Flight parameters and tips
We recommend our Drone Partners to follow the flight parameters and tips below when performing any jobs for Aerobotics. These parameters are relevant for all orchard mapping standard flights and for most of the orchard mapping thermal flights. A separate section details the specific parameters to use when performing the orchard mapping thermal flights (i.e. Flying with the Altum).
Parameters
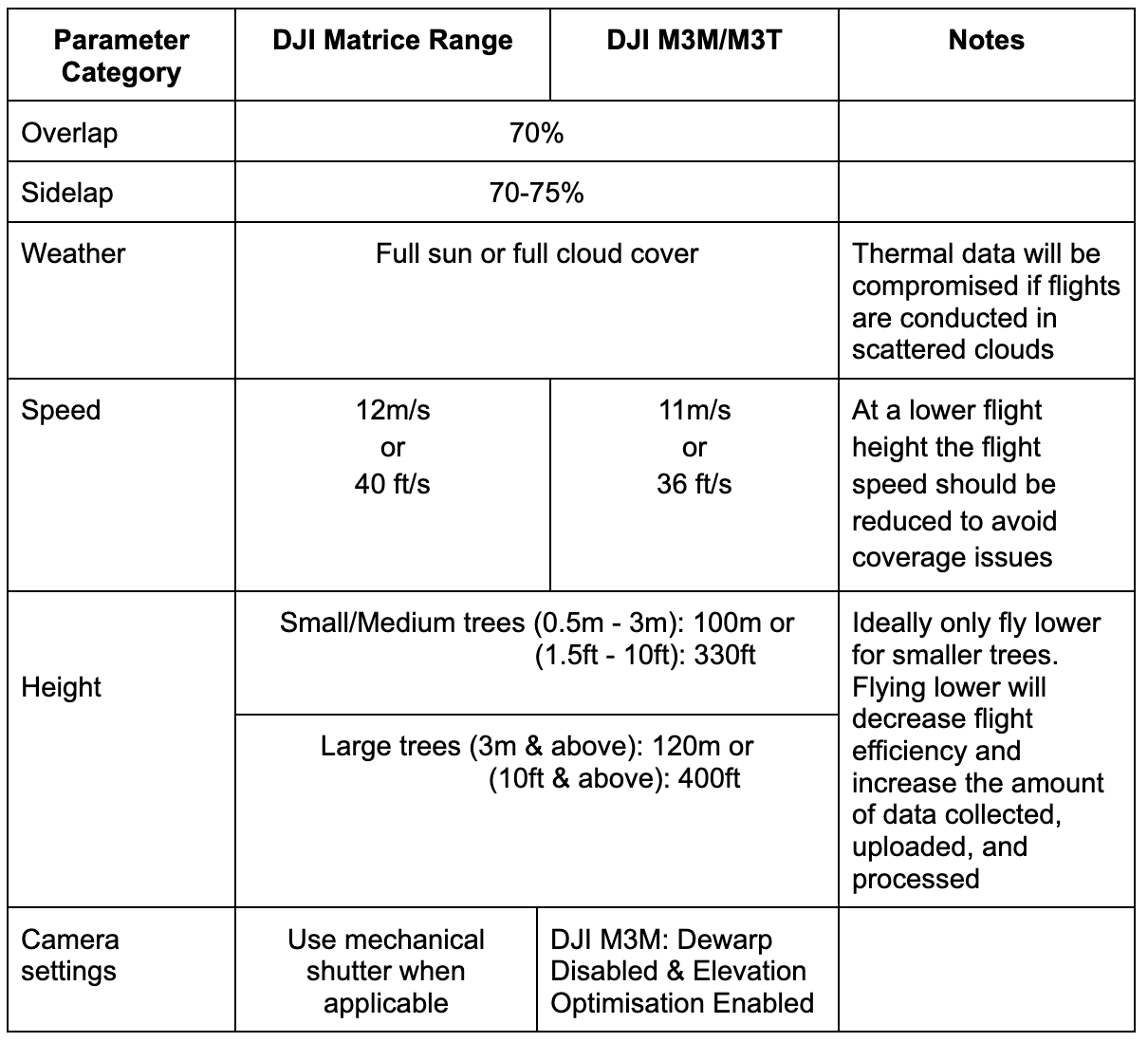
Flying Tips
- Always fly from the highest point.
- Make sure you have a larger car that can handle the tough terrain of farms and be able to get from block to block easily.
- Make sure that there is no more than 30m elevation difference per flight.
- Fly between 9.30 am and 3:30 pm. Smaller trees or vines can be flown from 9:30 am. Bigger trees to be flown closer to solar noon. Start the day and end the day with smaller trees, which reduces the possibility of shadows. Bigger trees will have larger shadows for a longer portion of the day.
- Don’t fly when there are rolling or scattered clouds. You can fly when there is full cloud cover.
- Make sure the DJI drone camera is using default settings.
- Make sure your MicaSense camera is updated to the latest firmware. Check for the latest update here.
- In between flights, load your data onto your computer and ensure that there are no defective or missing images. It is best to ensure everything is there before you leave the farm. You don’t want to get home and attempt to upload but have missing images or insufficient coverage.
- When selecting a boundary to fly, ensure you fly with a buffer so that there is enough coverage. Either pull the blue dots out or fly with a bigger flight path. Often the MicaSense camera misses a photo when it turns.
- We have had cases of the power plug on the MicaSense camera losing connection. We recommend securing the cable with some putty or hot glue to ensure the vibrations during flight don’t cause the camera to switch off and miss images.
- To make sure you have enough MicaSense MSP coverage from your flights, drop all the images into the Aeroview uploader in the field.
- If the boundary is a triangle please redraw the boundary as shown below.
Ensuring the correct overlap
- Getting the correct overlap of drone imagery is important to ensure successful data processing. Aerobotics requires 75% overlap and side lap (set through the Flight Planner App). However, this overlap is set relative to your takeoff point, thus where you take off from is important.
- Please do NOT take off from the lower part of your mission. This will reduce overlap between images where the terrain is higher than the takeoff point.
- Take off from near the highest part of your mission. This will increase overlap as the terrain gets lower than the takeoff point.
- Please include full orchard blocks in a single flight where possible, rather than splitting a block across multiple flights. Multiple blocks can be included in one flight, but try to avoid capturing only part of a block or boundary in one flight and the rest in another.
- A flight should never be carried out if there is more than a 30m elevation gain. The height above ground should never exceed 120m. Therefore, if there is a 30m elevation difference, you should fly from the highest point and set the height to 80/90m. If you are worried about lower resolution imagery when flying steep slopes, break the mission up into separate flights with different takeoff points.
- When flying areas with steep slopes, it is best to fly along the contour of the slope.
Flying with the Altum
The Altum sensor measurements are influenced by the internal state of the Altum sensor, including sensor temperature. To reduce that influence, we need all images over a single orchard to be captured with the Altum sensor under the same conditions.
The Aerobotics Flying with Altum PDF outlines a basic checklist of requirements for pilots to follow.
Organizing your data
- Offload data from both the MicaSense and DJI Drone every 2-3 flights onto a laptop
- To ensure your data looks good, have a look at the first and last images.
- To ensure you don't have any corrupt files, arrange the images in order of size - any photos with a size of 0kb are corrupted.
- To organize the collected data, create a folder called flight 1. Within that folder, create two folders, one called ‘MSP’ and one called ‘Visual’. Copy the visual images from the DJI drone memory card to the Visual folder and copy the Multispectral images from the MicaSense memory card to the MSP folder. Do that for every flight thereafter.